We have now developed sufficient algebraic machinery to revisit plane geometry through the lens of vectors. Rather than reformulating the entirety of Euclidean geometry, we establish a dictionary between the geometric properties of the plane and the algebraic structure of the vector space R2. This correspondence allows us to prove geometric theorems with algebraic rigour.
Position and Displacement Vectors
Definition 10 (Position Vector)
Let O=(0,0) be the origin of the Cartesian plane. For any point A=(a1,a2), the vector a=[a1a2] represented by the directed segment OA is called the position vector of A.
Through this convention, every point in the plane is uniquely associated with a vector. The position vector of a point is simply the vector whose components are the coordinates of that point. While position vectors are “bound” to the origin, we also need vectors between arbitrary points.
Definition 11 (Displacement Vector)
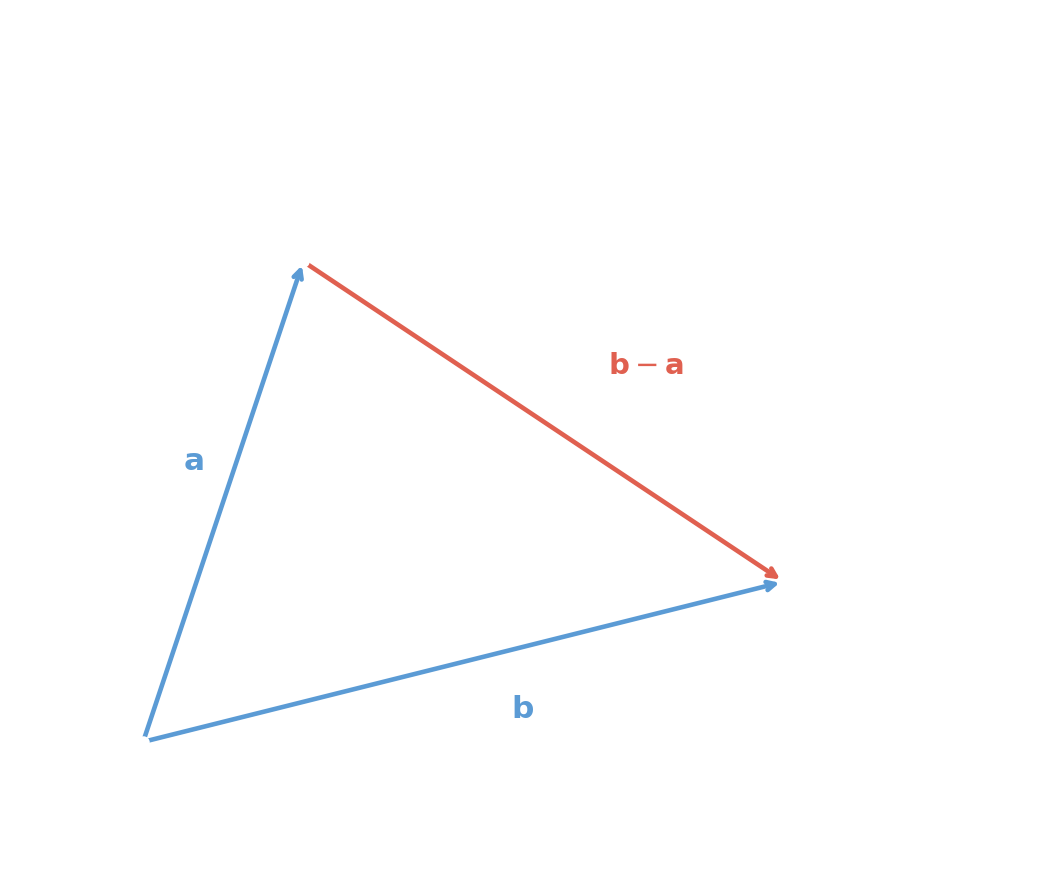
Let A and B be distinct points with position vectors a and b respectively. The directed segment AB is represented by the vector
AB=b−a.
This vector is called the displacement vector from A to B.
Remark
This definition is consistent with the triangle rule for vector addition. The chain OA+AB=OB implies a+AB=b, so AB=b−a. Observe that reversing direction negates the vector: BA=a−b=−AB.
With position and displacement vectors in hand, fundamental geometric properties translate directly into vector notation.
Distance: The length of the segment AB is the magnitude of the displacement vector: d(A,B)=∥b−a∥.
Collinearity: Three distinct points A,B,C are collinear if and only if the displacement vectors AB and AC are linearly dependent (Definition 9). That is, b−a=k(c−a) for some scalar k.
Parallelograms: A quadrilateral ABCD is a parallelogram if and only if AB=DC, which in terms of position vectors reads b−a=c−d.
Example 7
Let A=(1,3), B=(4,1), and C=(7,−1). The displacement vectors are:
AB=[3−2],AC=[6−4]=2[3−2]=2AB.
Since AC is a scalar multiple of AB, the three points are collinear. The distance from A to B is ∥AB∥=9+4=13.
Example 8
Let P=(2,1), Q=(5,3), and R=(3,4). Are these three points collinear?
PQ=[32],PR=[13].
If PR=kPQ, then 1=3k and 3=2k, giving k=1/3 and k=3/2 respectively. These are inconsistent, so no such k exists. Alternatively, the determinant (Theorem 5) is 3⋅3−2⋅1=7=0. The three points are not collinear; they form a triangle.
The Midpoint Formula
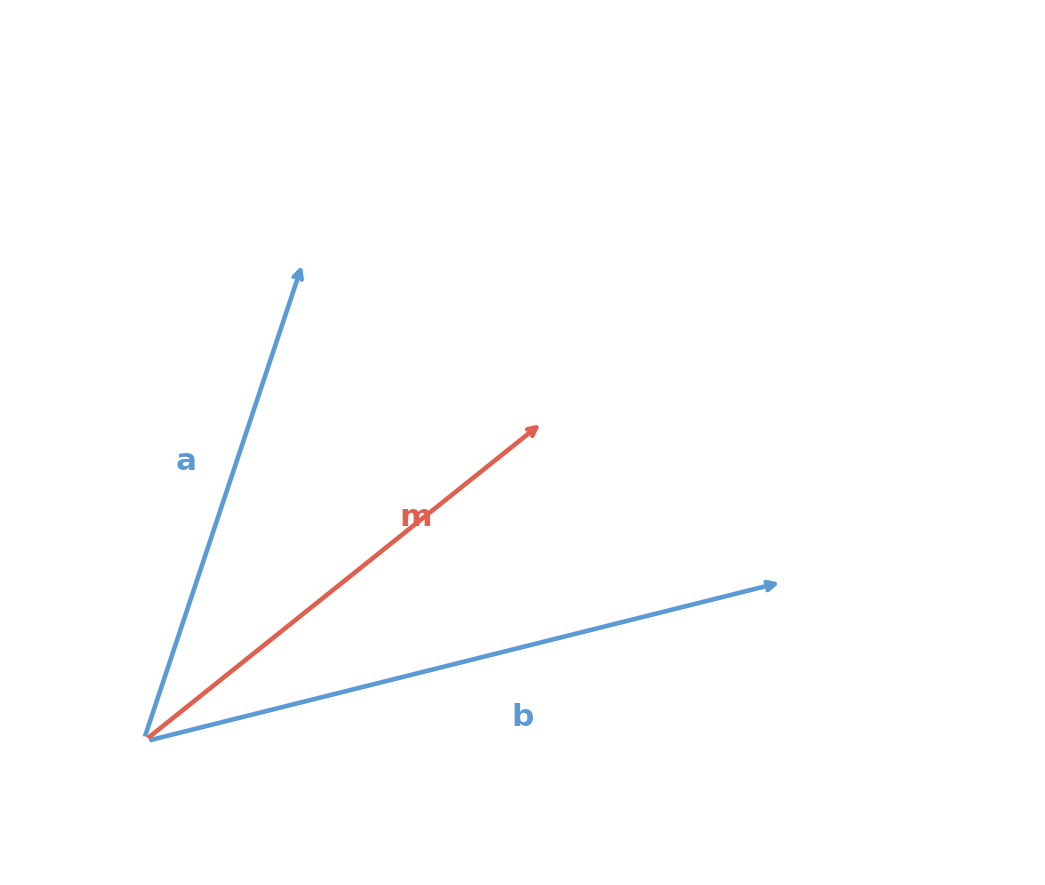
Theorem 9 (Midpoint Formula)
Let A and B be points with position vectors a and b. The midpoint M of the segment AB has the position vector
m=21(a+b).
Proof
Let M be the midpoint of AB. By definition, M divides the segment into two equal parts, so the displacement from A to M equals the displacement from M to B:
AM=MB.
In terms of position vectors, m−a=b−m. Adding m to both sides gives 2m=a+b, whence m=21(a+b).
■
The midpoint is therefore the average of the two position vectors.
Example 9
For A=(1,3) and B=(4,1), the midpoint is
M=21([13]+[41])=21[54]=(25,2).
Problem 7
Let A=(3,−1) and M=(5,2), where M is the midpoint of AB. Determine the coordinates of B.
Parallelogram Diagonals
Using the midpoint formula, we can prove a classical result about parallelograms with almost no computation.
Theorem 10 (Parallelogram Diagonals)
The diagonals of a parallelogram bisect each other.
Proof
Let ABCD be a parallelogram with position vectors a,b,c,d. Since ABCD is a parallelogram, opposite sides are equal and parallel: AB=DC. In terms of position vectors, b−a=c−d, which rearranges to
a+c=b+d.
The midpoint of diagonal AC has position vector m1=21(a+c), and the midpoint of diagonal BD has position vector m2=21(b+d). Since a+c=b+d, it follows that m1=m2. The midpoints of the diagonals coincide, so the diagonals bisect each other.
■
Example 10
Let A=(0,0), B=(3,1), D=(1,2). For ABCD to be a parallelogram, we need AB=DC, so C=B+D−A=(4,3). The midpoint of AC is 21(0+4,0+3)=(2,3/2). The midpoint of BD is 21(3+1,1+2)=(2,3/2). The diagonals bisect each other, as the theorem guarantees.
Problem 8
A quadrilateral ABCD has vertices A=(1,0), B=(4,1), C=(5,4), D=(2,3). Verify that ABCD is a parallelogram by checking AB=DC. Then confirm that the midpoints of the diagonals coincide.
The Parametric Equation of a Line
We established above that a point X lies on the line passing through A and B if and only if the vectors AX and AB are linearly dependent. The parametric equation makes this condition explicit by expressing every point on the line in terms of a single real parameter.
Theorem 11 (Parametric Line Equation)
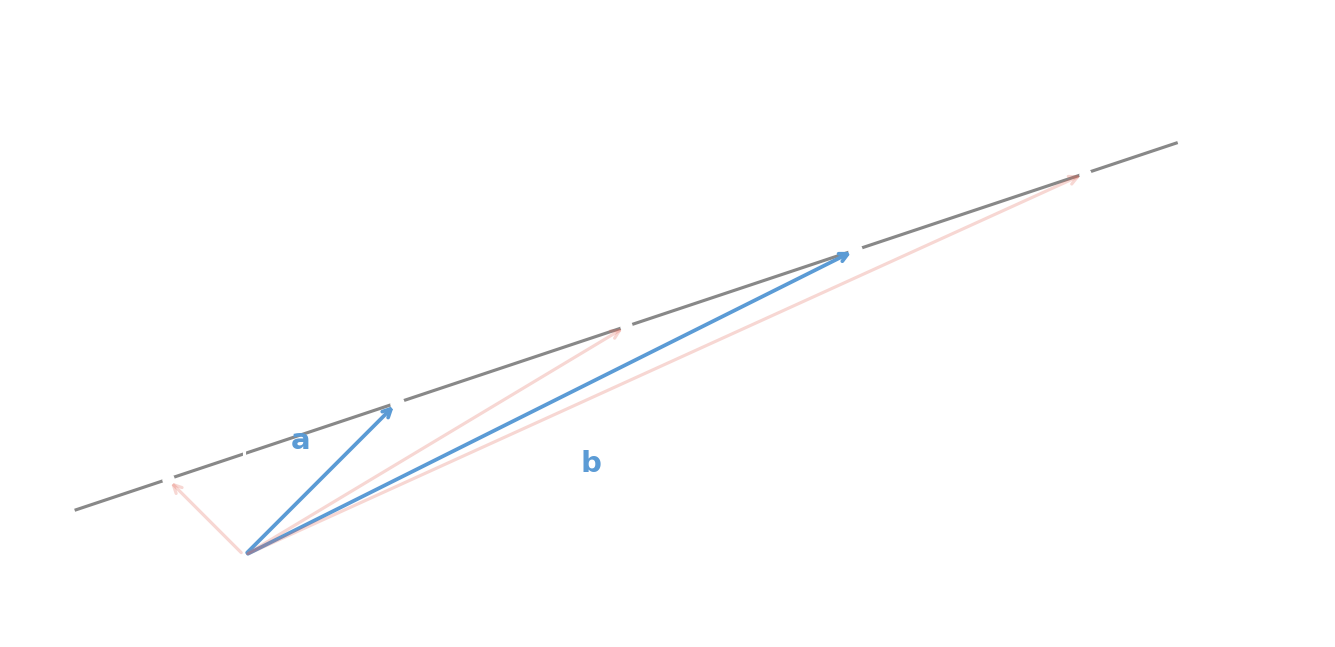
Let A and B be distinct points with position vectors a and b. A point X lies on the line LAB if and only if its position vector x satisfies
x=(1−t)a+tb
for some scalar t∈R.
Proof
Suppose X lies on LAB. Then AX is parallel to AB, so AX=tAB for some scalar t. In terms of position vectors:
x−a=t(b−a).
Rearranging: x=a+tb−ta=(1−t)a+tb.
Conversely, if x=(1−t)a+tb, then x−a=t(b−a), so AX=tAB, which means AX and AB are linearly dependent and X lies on LAB.
■
The scalar t is the parameter. The position of X relative to A and B is determined entirely by t:
t=0 gives x=a, so X=A.
t=1 gives x=b, so X=B.
0<t<1 places X strictly between A and B, on the segment AB.
t>1 places X beyond B, so that B lies between A and X.
t<0 places X beyond A in the opposite direction, so that A lies between X and B.
Remark
The midpoint formula (Theorem 9) is a special case of the parametric line equation with t=1/2:
x=21a+21b=21(a+b).
Note (Convex Combination)
For two vectors a and b, a convex combination means an expression of the form
(1−t)a+tb
with 0≤t≤1. More generally, a convex combination of vectors v1,…,vk is an expression
t1v1+⋯+tkvk
in which every coefficient satisfies tj≥0 and the coefficients sum to 1. In the two-vector case, the restriction 0≤t≤1 is exactly what keeps the point on the segment joining a and b rather than on the whole line through them.
Example 11
Let A=(1,2) and B=(4,5). The point on LAB with parameter t=2/3 is
x=31[12]+32[45]=[1/3+8/32/3+10/3]=[34].
Since 0<2/3<1, this point lies on the segment AB, two-thirds of the way from A to B.
Problem 9
Let A=(2,−1) and B=(6,7).
Find the parameter t such that the point X on LAB has coordinates (5,5).
Write the position vector of X explicitly as a convex combination of the position vectors of A and B.
Explain why every point of the form
(1−s)a+sb
with 0≤s≤1 lies on the segment AB rather than merely somewhere on the full line through A and B.
Problem 10
Suppose three assessments in a course carry weights 20%, 30%, and 50%. Let u, v, and w be the grade vectors recording the marks of the whole class on these three assessments, listed in the same order of students each time.
Write a single vector whose entries are the weighted overall marks of the class.
Explain why this vector is a convex combination of u, v, and w.
State what changes in the formula if the assessment weights are replaced by arbitrary non-negative weights that still sum to 1.
Concurrency and the Centroid
The parametric representation is particularly powerful for proving concurrency theorems: results asserting that several lines pass through a single common point.
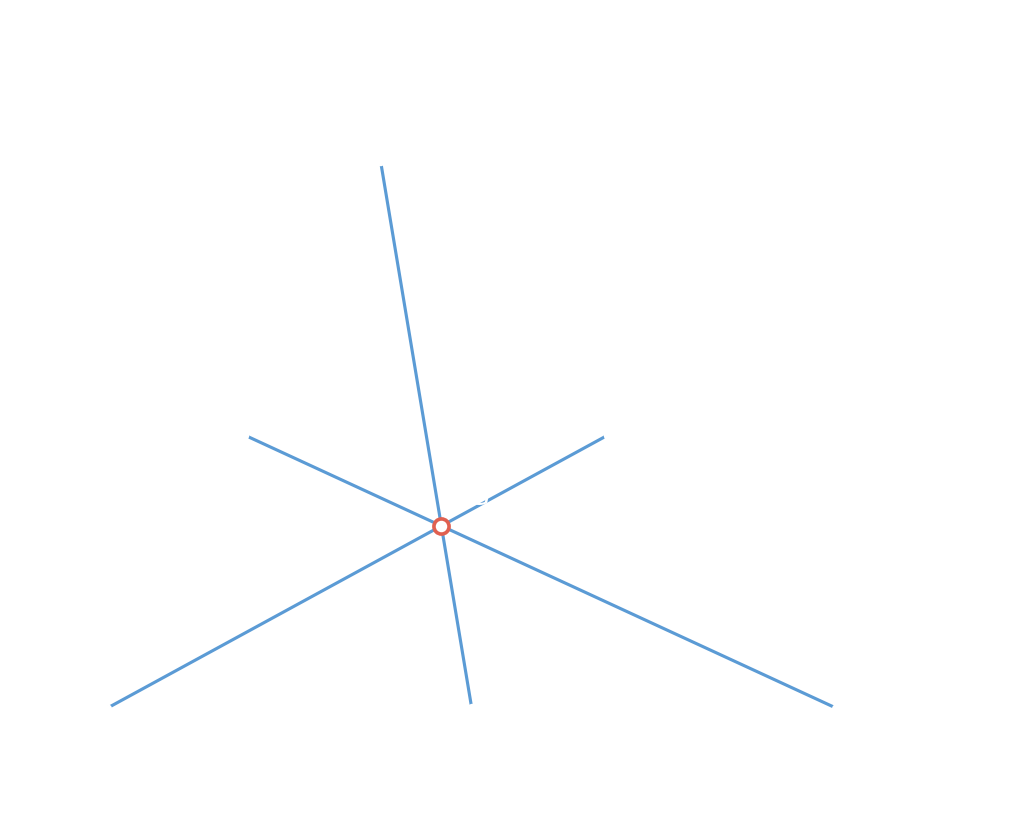
Theorem 12 (Concurrency of Medians)
The three medians of a triangle are concurrent. Their common point is called the centroid.
Proof
Let ABC be a triangle with position vectors a,b,c. The midpoints of the sides BC, CA, AB are, by Theorem 9:
d=21(b+c),e=21(c+a),f=21(a+b).
Consider the median from A to D. By the parametric line equation (Theorem 11), any point on this median has position vector
x=(1−t)a+td=(1−t)a+2t(b+c).
Choosing t=2/3 gives
g=31a+31b+31c=31(a+b+c).
This is the equal-weight convex combination of the three vertex position vectors.
The expression 31(a+b+c) is completely symmetric in a, b, c. Repeating the calculation on the median from B to E with parameter t=2/3 from B:
(1−32)b+32e=31b+31(c+a)=31(a+b+c)=g.
The same holds for the median from C to F. Since g lies on all three medians, the medians are concurrent at G, the centroid.
■
Remark
The parameter t=2/3 tells us that the centroid lies two-thirds of the way from each vertex to the opposite midpoint. Equivalently, the centroid divides each median in a 2:1 ratio, measured from vertex to midpoint.
Note (Symmetry of an Expression)
An expression in several variables is called symmetric if it is unchanged when the variables are permuted. The formula 31(a+b+c) treats a, b, and c identically: swapping any two of them produces the same result. This means that any property we derive for one variable automatically holds for the others. In the proof above, once we showed that g lies on the median from A, the symmetric form of g guaranteed the same conclusion for the medians from B and C without repeating the calculation. This reasoning pattern, known as argument by symmetry, appears frequently throughout mathematics: if the setup treats several objects identically, a conclusion established for one must hold for all.
Example 12
Let A=(0,0), B=(6,0), C=(3,6). The centroid is
G=31(0+6+3,0+0+6)=(3,2).
We verify: the midpoint of BC is D=(9/2,3). On the median AD, the point with t=2/3 is
31(0,0)+32(9/2,3)=(3,2)=G.✓
Problem 11
Let A=(1,1), B=(5,3), C=(3,7). Compute the centroid G and verify that G divides the median from C to the midpoint of AB in a 2:1 ratio.
Affine Dependence and Menelaus’ Theorem
To handle more advanced incidence theorems, we need a more flexible criterion for collinearity than linear dependence of displacement vectors. The following result characterises collinearity through a condition on position vectors directly.
Theorem 13 (Affine Dependence)
Three points X,Y,Z with position vectors x,y,z are collinear if and only if there exist scalars u,v,w, not all zero, such that
ux+vy+wz=0andu+v+w=0.
Proof
Suppose X,Y,Z are collinear. Then Z lies on the line through X and Y, so by the parametric line equation (Theorem 11), z=(1−t)x+ty for some scalar t. Rearranging:
(1−t)x+ty−z=0.
Setting u=1−t, v=t, w=−1, we have ux+vy+wz=0 and u+v+w=(1−t)+t−1=0. Since w=−1=0, not all scalars are zero.
Conversely, suppose ux+vy+wz=0 and u+v+w=0, with not all of u,v,w zero. Relabel the three points if necessary so that w=0. Then w=−(u+v), so
ux+vy−(u+v)z=0⟹(u+v)z=ux+vy.
Since w=0, we have u+v=0, so we can divide:
z=u+vux+u+vvy.
Setting t=u+vv gives 1−t=u+vu, so z=(1−t)x+ty. By Theorem 11, Z lies on the line through X and Y.
■
We now apply this criterion to prove Menelaus’ theorem, one of the classical results in triangle geometry. We first need a notion that measures where a point falls on a line relative to two reference points.
Definition 12 (Directed Ratio)
Let A and B be distinct points. For any point Z on the line LAB with Z=B, the directed ratio of Z relative to A,B, denoted dr(A,B;Z), is the unique scalar r such that
AZ=rZB.
Remark
If Z lies between A and B, then AZ and ZB point in the same direction, so r>0. If Z lies outside the segment AB, they point in opposite directions, so r<0. In terms of position vectors, z−a=r(b−z), which rearranges to (1+r)z=a+rb.
Example 13
Let A=(0,0) and B=(6,0). The point Z=(2,0) lies between A and B. We have AZ=[20] and ZB=[40], so AZ=21ZB and dr(A,B;Z)=1/2>0. The point Z′=(−3,0) lies outside AB: AZ′=[−30] and Z′B=[90], so dr(A,B;Z′)=−1/3<0.
Theorem 14 (Menelaus' Theorem)
Let X,Y,Z be points on the lines containing sides BC, CA, AB of a triangle ABC, respectively, with X=C, Y=A, and Z=B, so that the directed ratios below are defined. Then X,Y,Z are collinear if and only if
dr(B,C;X)⋅dr(C,A;Y)⋅dr(A,B;Z)=−1.
Proof
Let r=dr(B,C;X), s=dr(C,A;Y), and t=dr(A,B;Z). From the definition of directed ratio:
(1+r)x=b+rc,(1+s)y=c+sa,(1+t)z=a+tb.
Assume rst=−1. We form a linear combination of x, y, z designed to satisfy the affine dependence criterion (Theorem 13). Consider
Since rst=−1, we have str+1=0, so the entire combination equals 0.
We also check the sum of the coefficients:
st(1+r)+(1+s)−s(1+t)=st+str+1+s−s−st=str+1=0.
By Theorem 13, the points X,Y,Z are collinear.
The converse follows by reversing the argument: if X,Y,Z are collinear, Theorem 13 provides scalars u,v,w with u+v+w=0 and ux+vy+wz=0. Expressing x,y,z in terms of a,b,c and comparing coefficients forces rst=−1.
■
Example 14
Consider the triangle with A=(0,0), B=(4,0), C=(3,3). Let the line ℓ intersect side CA at Y=(1.2,1.2) and line AB at Z=(−1.5,0). We compute the directed ratios and verify Menelaus’ condition.
For Y on CA: CY=(−1.8,−1.8) and YA=(−1.2,−1.2), so s=dr(C,A;Y)=3/2.
For Z on AB: AZ=(−1.5,0) and ZB=(5.5,0), so t=dr(A,B;Z)=−3/11.
Let A=(0,0), B=(6,0), C=(2,4). The point X lies on BC with dr(B,C;X)=1 (i.e., X is the midpoint of BC), and Z lies on line AB with dr(A,B;Z)=−1/2. Use Menelaus’ theorem to find dr(C,A;Y), and hence determine the coordinates of Y on line CA.
The Dot Product
In the preceding sections, we employed vector algebra to investigate affine properties of plane geometry: parallelism, collinearity, and ratios of segments. These properties are independent of any specific unit of measurement. However, to discuss metric geometry (concepts involving lengths and angles), we require a stronger algebraic tool. This tool is the dot product.
Definition 13 (Dot Product)
Let a=[a1a2] and b=[b1b2] be vectors in R2. The dot product (also known as the scalar product or inner product) of a and b is the real number defined by:
a⋅b=a1b1+a2b2.
It is crucial to observe that while the operation takes two vectors as input, the output is a scalar. By examining the definition alongside our earlier definition of magnitude (Definition 3), we immediately observe a fundamental link between the dot product and the magnitude of a vector:
a⋅a=a12+a22=∥a∥2.
Thus, the magnitude of a vector is the square root of the dot product of the vector with itself: ∥a∥=a⋅a.
Example 15
Let a=[3−1] and b=[24]. Then a⋅b=(3)(2)+(−1)(4)=2. Also, a⋅a=9+1=10=∥a∥2, consistent with ∥a∥=10 from Definition 3.
The dot product satisfies several fundamental algebraic laws which justify its manipulation in equations.
Theorem 15 (Algebraic Properties of the Dot Product)
For any vectors a,b,c∈R2 and any scalar r∈R, the following hold:
Symmetry:a⋅b=b⋅a.
Bilinearity: The dot product is linear in both arguments:
(ra+b)⋅c=r(a⋅c)+b⋅c.
a⋅(rb+c)=r(a⋅b)+a⋅c.
Positive Definiteness:a⋅a≥0, with equality if and only if a=0.
Proof
These properties follow directly from the properties of real numbers. Symmetry holds because a1b1+a2b2=b1a1+b2a2. Bilinearity is verified by expanding the components: (ra1+b1)c1+(ra2+b2)c2=r(a1c1+a2c2)+(b1c1+b2c2). The second bilinearity identity follows from symmetry and the first. Positive definiteness follows from the fact that a12+a22≥0, with equality only when a1=a2=0.
■
Remark
The vector space R2 equipped with this specific dot product is often referred to as the Euclidean plane. This structure bridges the gap between abstract vector spaces and Euclidean geometry.
Metric Theorems
The interaction between the dot product and the magnitude leads to several powerful inequalities and identities.
Theorem 16 (Fundamental Metric Identities)
Let a and b be vectors in R2.
Homogeneity:∥ra∥=∣r∣∥a∥.
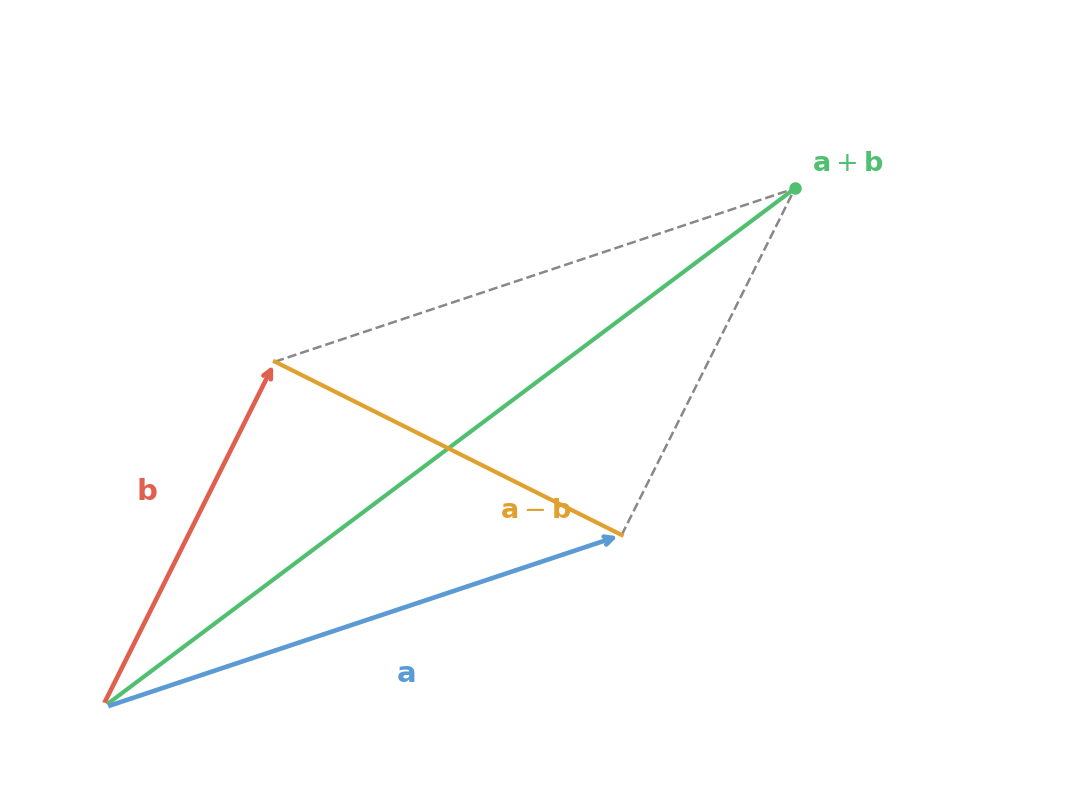
Parallelogram Law:∥a+b∥2+∥a−b∥2=2(∥a∥2+∥b∥2).
Cauchy-Schwarz Inequality:∣a⋅b∣≤∥a∥∥b∥.
Triangle Inequality:∥a+b∥≤∥a∥+∥b∥.
Law of Cosines:∥a−b∥2=∥a∥2+∥b∥2−2(a⋅b).
Proof
(i) We have ∥ra∥2=(ra)⋅(ra)=r2(a⋅a)=r2∥a∥2. Taking square roots gives ∥ra∥=∣r∣∥a∥.
(ii) We expand the norms using the dot product properties:
Adding these two equations yields the result. Geometrically, this states that the sum of the squares of the diagonals of a parallelogram equals the sum of the squares of its sides.
(iii) If a=0, the inequality holds trivially. Assume a=0. Consider the vector v(x)=xa+b for any scalar x. By positive definiteness, ∥v(x)∥2≥0. Expanding:
∥xa+b∥2=x2∥a∥2+2x(a⋅b)+∥b∥2≥0.
This is a quadratic polynomial in x. Since it is non-negative for all real x, its discriminant must be non-positive:
Δ=4(a⋅b)2−4∥a∥2∥b∥2≤0⟹(a⋅b)2≤∥a∥2∥b∥2.
Taking the square root yields ∣a⋅b∣≤∥a∥∥b∥.
(iv) Using the expansion from part (ii) and the Cauchy-Schwarz inequality:
(v) This is simply the expansion ∥a−b∥2=(a−b)⋅(a−b)=∥a∥2−2(a⋅b)+∥b∥2.
■
Angle and Orthogonality
To appreciate why identity (v) in Theorem 16 is commonly referred to as the Cosine Law for vectors, consider a triangle OAB in the plane. Let θ be the angle at the vertex O. The classical Law of Cosines from trigonometry states:
AB2=OA2+OB2−2(OA)(OB)cosθ.
Setting a=OA and b=OB, we have AB=∥a−b∥. Substituting:
∥a−b∥2=∥a∥2+∥b∥2−2∥a∥∥b∥cosθ.
Comparing this with identity (v), which gives ∥a−b∥2=∥a∥2+∥b∥2−2(a⋅b), we equate the angle-dependent terms:
a⋅b=∥a∥∥b∥cosθor equivalentlycosθ=∥a∥∥b∥a⋅b.
This allows us to define the angle between two vectors rigorously. For the definition to be valid, the ratio on the right must lie in [−1,1]. The Cauchy-Schwarz inequality (identity (iii)) guarantees exactly this:
−1≤∥a∥∥b∥a⋅b≤1.
Thus the value is always valid for the arccosine function.
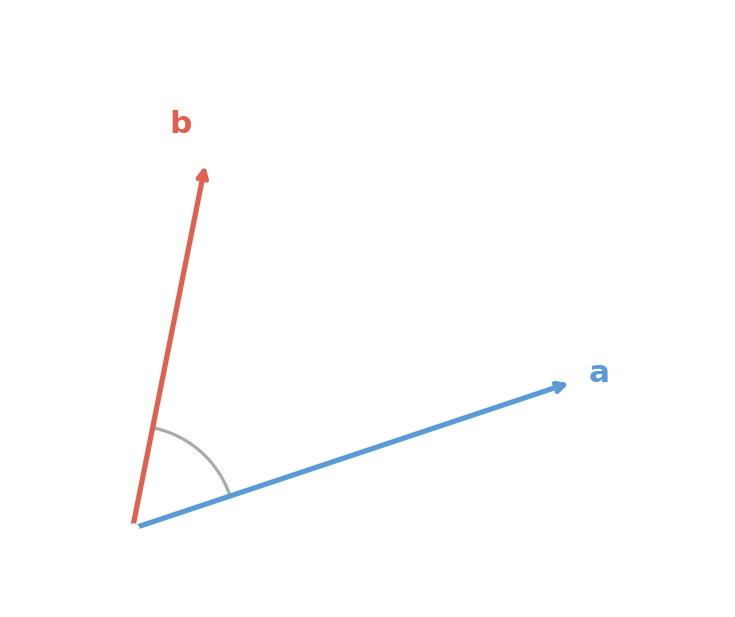
Definition 14 (Angle Between Vectors)
Let a and b be non-zero vectors. The angleθ between them is the unique number in the interval [0,π] such that
cosθ=∥a∥∥b∥a⋅b.
Example 16 (Calculating Angles)
Let a=[10], b=[−11], and c=[5−53]. First, we compute the magnitudes: ∥a∥=1, ∥b∥=2, ∥c∥=25+75=10.
(i) Angle between a and b:a⋅b=−1, so cosθ=−1/2, giving θ=3π/4.
(ii) Angle between a and c:a⋅c=5, so cosθ=5/10=1/2, giving θ=π/3.
(iii) Angle between b and c:b⋅c=−5−53, so cosθ=−5(1+3)/(102)=−(2+6)/4. This corresponds to θ=11π/12.
The dot product also provides a simple algebraic test for perpendicularity. If vectors a and b are perpendicular, the angle between them is π/2. Since cos(π/2)=0, this implies a⋅b=0. We formalise this as orthogonality, extending the concept to include the zero vector.
Definition 15 (Orthogonality)
Two vectors a and b are said to be orthogonal if a⋅b=0. We denote this by a⊥b.
Note
The zero vector is orthogonal to every vector in R2, since 0⋅b=0 for all b.
Example 17
The vectors a=[32] and b=[−23] are orthogonal, since a⋅b=(3)(−2)+(2)(3)=0. Notice that swapping the components and negating one always produces an orthogonal vector: if a=[a1a2], then a⊥=[a2−a1] satisfies a⋅a⊥=a1a2−a2a1=0.
Problem 13
Determine all vectors b=[b1b2] that are simultaneously orthogonal to a=[12] and have magnitude 5.
Orthogonal Projection
A fundamental problem in geometry and physics is the resolution of a vector into distinct components relative to a reference direction. Given a vector x and a non-zero reference vector a, we wish to decompose x into a sum x=p+b, where p is parallel to a and b is orthogonal to a.
One may approach this using elementary algebra. Let a=[a1a2]=0. We seek a scalar t and a scalar u such that x=ta+ua⊥, where a⊥=[a2−a1]. This leads to the system:
a1t+a2u=x1,a2t−a1u=x2.
Multiplying the first equation by a1 and the second by a2, then adding, eliminates u:
(a12+a22)t=a1x1+a2x2.
Recognising the terms as dot products and magnitudes, we obtain t∥a∥2=x⋅a, giving t=(x⋅a)/∥a∥2. This algebraic result motivates the following vector-based formulation.
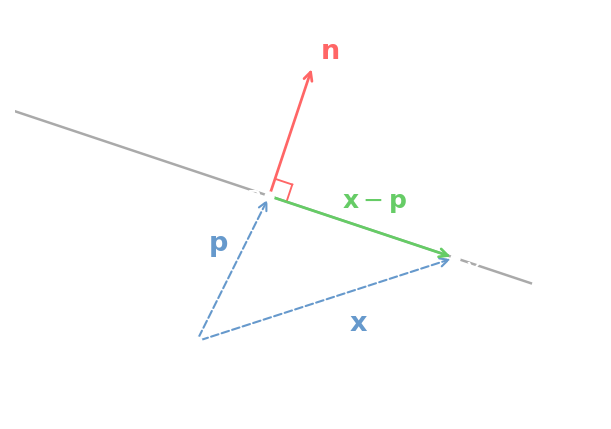
Theorem 17 (Orthogonal Decomposition)
Let a∈R2 be a non-zero vector. For any vector x∈R2, there exists a unique scalar t and a unique vector b such that
x=ta+bandb⊥a.
The vector p=ta is called the orthogonal projection of x onto a, denoted projax.
Proof
We seek a scalar t such that the vector b=x−ta is orthogonal to a:
(x−ta)⋅a=0⟹x⋅a−t(a⋅a)=0.
Since a=0, we have a⋅a=0, yielding the unique solution:
t=a⋅ax⋅a=∥a∥2x⋅a.
The projection vector is therefore:
projax=(∥a∥2x⋅a)a.■
Graphically, the vector b=x−projax represents the perpendicular displacement from the tip of the projection to the tip of x.
Corollary 1 (Special Cases)
x and a are linearly dependent if and only if projax=x (i.e., b=0).
x and a are orthogonal if and only if projax=0.
Proof
Recall from Theorem 17 that projax=(∥a∥2x⋅a)a and b=x−projax.
(i) If x and a are linearly dependent, then x=ka for some scalar k. Then x⋅a=k∥a∥2, so projax=ka=x, giving b=0. Conversely, if projax=x, then x=(∥a∥2x⋅a)a, which expresses x as a scalar multiple of a.
(ii) If x⊥a, then x⋅a=0, so projax=0. Conversely, if projax=0, then ∥a∥2x⋅a=0, which implies x⋅a=0, so x⊥a.
■
The length of the projection vector is given by:
∥projax∥=∥a∥2x⋅a∥a∥=∥a∥∣x⋅a∣.
This formula is particularly useful for finding the distance between points projected onto a line.
Example 18 (Projection of a Segment)
Let X=(−1,3), Y=(3,0), A=(2,4), and B=(1,−2). We wish to find the length of the orthogonal projection of the segment XY onto the line passing through A and B.
The displacement vectors are z=XY=[4−3] and c=AB=[−1−6]. The length of the projection of segment XY onto line AB is:
∥c∥∣z⋅c∣=1+36∣(4)(−1)+(−3)(−6)∣=3714.
Problem 14
Let a=[12] and x=[71]. Compute projax and the orthogonal component b=x−projax. Verify that b⊥a.
The Equation of a Straight Line
In elementary coordinate geometry, a straight line is defined as the locus of points X=(x,y) satisfying a linear equation of the form
ax+by+c=0,
where a and b are not both zero. By translating this algebraic constraint into the language of vectors, we uncover the geometric significance of the coefficients a and b.
The Point-Normal Form
Let n=[ab] and let x=[xy] be the position vector of a point X. The linear term ax+by is precisely the dot product n⋅x. Consequently, the equation of the line may be rewritten as
n⋅x+c=0.
To interpret this geometrically, let P be a fixed point on the line with position vector p. Since P lies on the line, its coordinates satisfy the equation, so n⋅p+c=0, which implies c=−n⋅p. Substituting this back into the general equation yields
n⋅x−n⋅p=0⟹n⋅(x−p)=0.
The vector x−p represents the displacement PX along the line. The condition n⋅PX=0 implies that n is orthogonal to the direction of the line.
Definition 16 (Normal Vector)
A non-zero vector n is called a normal vector to a straight line L if n is orthogonal to the displacement vector between any two distinct points on L.
This leads to the vector characterisation of a straight line.
Theorem 18 (Point-Normal Form)
The straight line passing through a specific point P with position vector p, and perpendicular to a non-zero normal vector n, consists of all points X with position vectors x satisfying
n⋅(x−p)=0.
Example 19 (Constructing a Line)
Find the equation of the line passing through A(3,2) and perpendicular to the vector n=[2−1].
The vector approach provides an elegant derivation for the distance from a point to a line, a result that is often tedious to prove using classical coordinates.
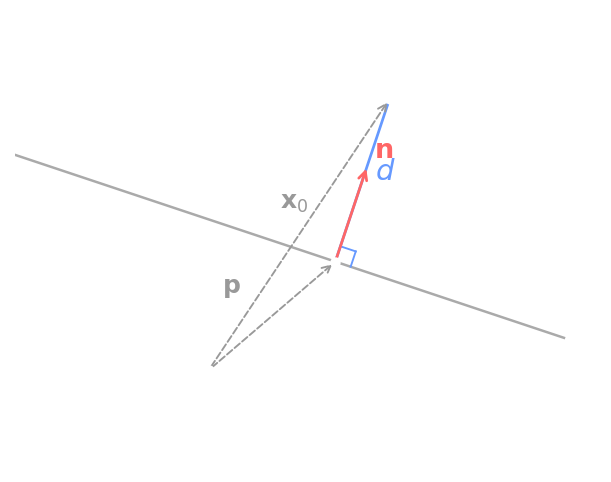
Theorem 19 (Distance to a Line)
Let L be the line defined by n⋅x+c=0, where n=0. The perpendicular distance from an arbitrary point X0 (with position vector x0) to L is given by
d(X0,L)=∥n∥∣n⋅x0+c∣.
Proof
Let P be any point on the line L. Then n⋅p+c=0, so c=−n⋅p. The distance from X0 to L is the length of the orthogonal projection of the displacement vector PX0 onto the normal vector n.
This theorem suggests a canonical way to represent straight lines. If we divide the equation n⋅x+c=0 by the magnitude ∥n∥, we obtain the Hessian normal form:
∥n∥n⋅x+∥n∥c=0.
Defining the unit normal n^=n/∥n∥ and p=c/∥n∥, the function f(x)=n^⋅x+p has the property that ∣f(x0)∣ gives the exact distance from X0 to the line.
Example 21 (Distance Calculation)
Find the distance from X0(2,−1) to the line 3x+4y−12=0.
Here n=[34], so ∥n∥=32+42=5.
d=5∣3(2)+4(−1)−12∣=5∣6−4−12∣=5∣−10∣=2.
Angle Between Lines
The angle between two straight lines is read from their respective normal vectors. This is consistent with the geometric intuition that if two lines intersect, the angle between them is preserved if both are rotated by 90° (transforming the lines into their normals).
Theorem 20 (Angle Between Lines)
Let L1 and L2 be lines with normal vectors n1 and n2 respectively. The acute angle ϕ∈[0,π/2] between the lines is given by
cosϕ=∥n1∥∥n2∥∣n1⋅n2∣.
Using the absolute value removes the arbitrary choice of normal direction: replacing one normal by its negative does not change the acute angle between the unoriented lines.
Example 22 (Angle Between Two Lines)
Find the angle between the lines x−2y+3=0 and 3x+y−5=0.